Claire Chen
I recently completed my Ph.D. at Stanford University, where I was advised by Jeannette Bohg in the IPRL lab. I design methods that combine multi-modal sensing, control, and machine learning to help robots interact with the world, like opening many doors and drawers or an AirPods case.
Research
DexForce: Extracting Force-informed Actions from Kinesthetic Demonstrations for Dexterous Manipulation
Claire Chen, Zhongchun Yu, Hojung Choi, Mark Cutkosky, and Jeannette Bohg
IEEE Robotics and Automation Letters (RA-L), 2025
Webpage •
PDF
Causal-PIK: Causality-based Physical Reasoning with a Physics-Informed Kernel
Carlota Parés Morlans, Michelle Yi, Claire Chen,
Sarah A. Wu, Rika Antonova, Tobias Gerstenberg, and Jeannette Bohg
International Conference on Machine Learning (ICML), 2025
Webpage •
PDF
AO-Grasp: Articulated Object Grasp Generation
Carlota Parés Morlans*, Claire Chen*, Yijia Weng, Michelle Yi, Yuying Huang, Nick Heppert, Linqi Zhou, Leonidas Guibas, and Jeannette Bohg
International Conference on Intelligent Robots and Systems (IROS), 2024
Webpage
•
PDF
•
Code
•
Dataset
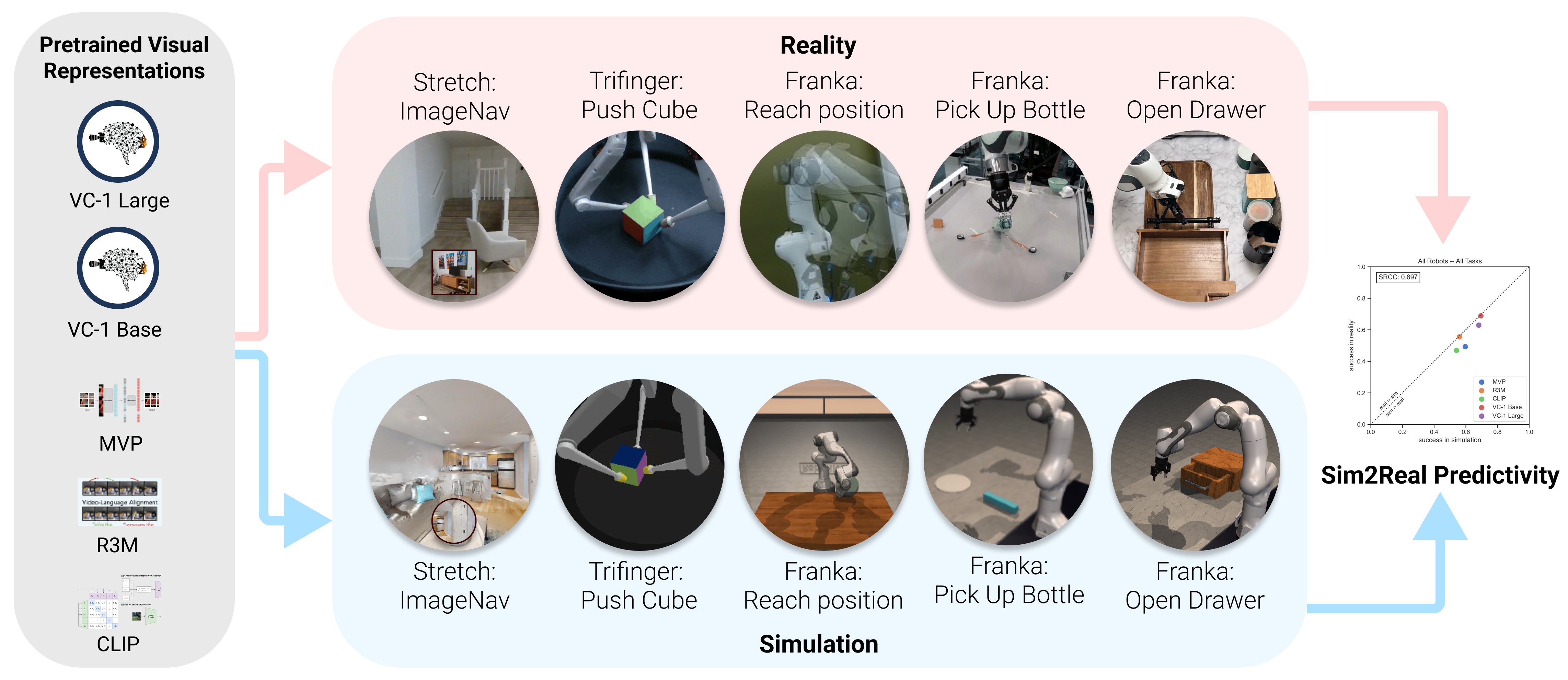
What Do We Learn from a Large‐Scale Study of Pre‐Trained Visual Representations in Sim and Real Environments?
Sneha Silwal*, Karmesh Yadav*, Tingfan Wu*, Jay Vakil*, Arjun Majumdar*, Sergio Arnaud*, Claire Chen, Vincent‐Pierre Berges, Dhruv Batra, Aravind Rajeswaran, Mrinal Kalakrishnan, Franziska Meier†, and Oleksandr Maksymets†
International Conference on Robotics and Automation (ICRA), 2024
Webpage •
PDF
Where are we in the search for an Artificial Visual Cortex for Embodied Intelligence?
Arjun Majumdar*, Karmesh Yadav*, Sergio Arnaud*, Yecheng Jason Ma, Claire Chen, Sneha Silwal, Aryan Jain, Vincent‐Pierre Berges, Pieter Abbeel, Jitendra Malik, Dhruv Batra,
Yixin Lin†,
Oleksandr Maksymets†,
Aravind Rajeswaran†,
and Franziska Meier†
Advances in Neural Information Processing Systems (NeurIPS), 2023
Webpage •
PDF
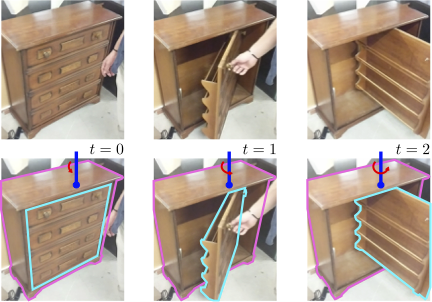
Category‐independent Articulated Object Tracking with Factor Graphs
Nick Heppert, Toki Migimatsu, Brent Yi, Claire Chen, and Jeannette Bohg
International Conference on Intelligent Robots and Systems (IROS), 2022
Webpage •
PDF
Dexterous Manipulation Primitives for the Real Robot Challenge
Claire Chen, Krishnan Srinivasan, Jeffrey Zhang, Junwu Zhang, Lin Shao, Shenli Yuan, Preston Culbertson, Hongkai Dai, Mac Schwager, and Jeannette Bohg
PDF •
Real Robot Challenge
TrajectoTree: Trajectory Optimization Meets Tree Search for Planning Multi‐contact Dexterous Manipulation
Claire Chen, Preston Culbertson, Marion Lepert, Mac Schwager, and Jeannette Bohg
International Conference on Intelligent Robots and Systems (IROS), 2021
Webpage •
PDF
* denotes equal contribution † denotes equal advising